
XPS-RLD Universal High-Performance 1-4 Axis Motion Controller and Driver
XPS-RLD Universal High-Performance 1-4 Axis Motion Controller and Driver

The more user friendly, 4-axis, XPS-RLD universal motion controller drives a variety of motor types and execute complex motion through high speed Ethernet TCP/IP interface. From its outstanding servo rate and triggering, to its intuitive GUI and Plug-and-Play ESP technology, the lower cost XPS-RLD is an excellent choice for both research and OEM applications.
- Up to 4 axes universal motion controller
- ESP Plug and Play
- User-friendly interface
- Single-click stage configuration
- .NET assemblies See All Features
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | XPS-RLD2Motion Controller, 2-axis Universal Driver, Ethernet, Basic GPIO and PCO | In Stock | ||||
| XPS-RLD4Motion Controller, 4-axis Universal Driver, Ethernet, Basic GPIO and PCO | |||||
 | XPS-RLDMDirect Drive Controller, 1-axis, Ethernet, Basic GPIO and PCO |
Specifications
- Command SetObject oriented language, 100+ functions, TCL generated scripts, EPICS Compatible
- CompensationLinear error, backlash compensation, error mapping
- Computer InterfacesTwo Ethernet 10/100/1000 Base-T
- Control AlgorithmPI Position, PIDFF Velocity, PIDFF Acceleration, PIDDualFF Voltage, Variable PID's, Derivative Cut-off Filter, Notch Filters, or Open Loop
- ESP CompatibilityESP Stage Detection
- MotionSynchronized pt to pt, Spindle, Linear/circular interpolation, Splines, PVT, Analog tracking, Master-slave
Features
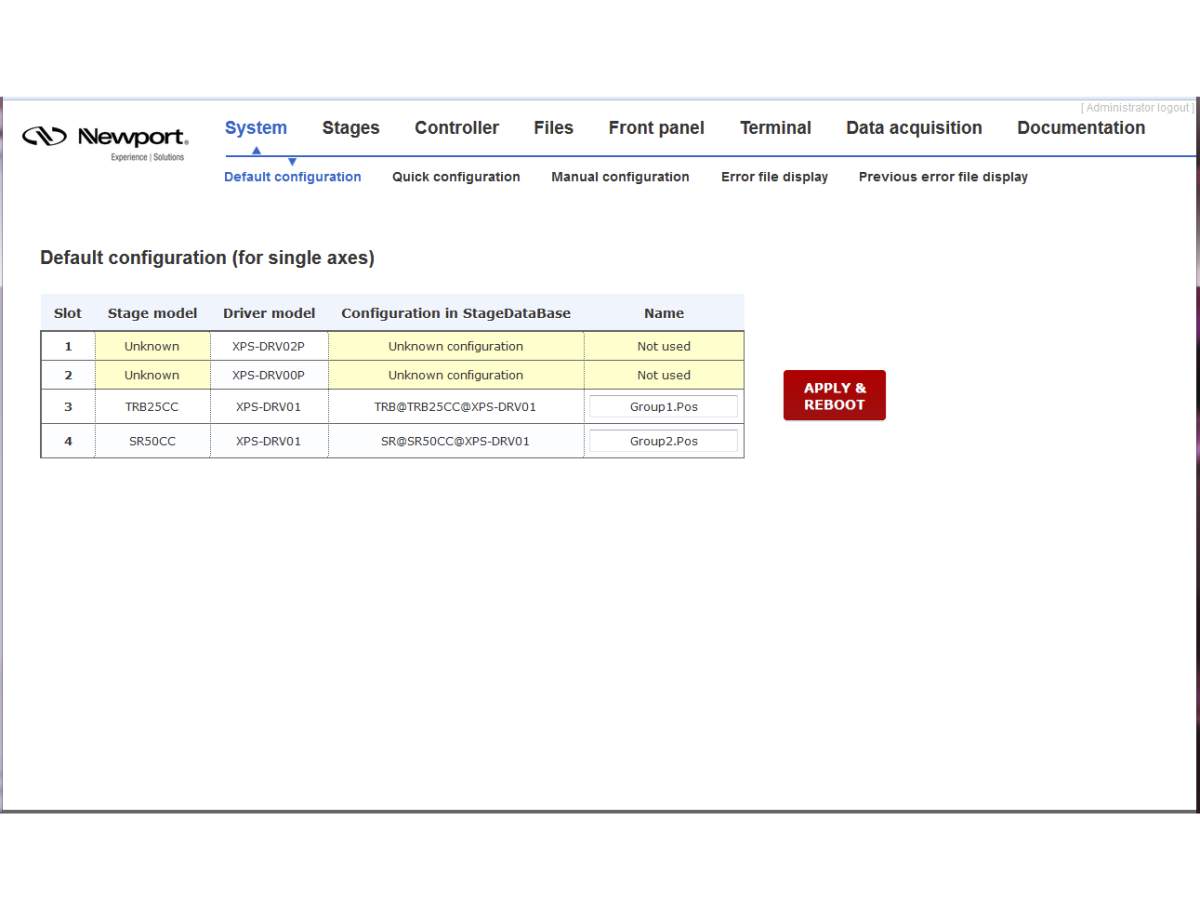
ESP Plug-and-Play Compatibility

Single-click Configuration
The web interface allows a quick configuration of the XPS-RLD, as simple as that in the ESP301 controller.
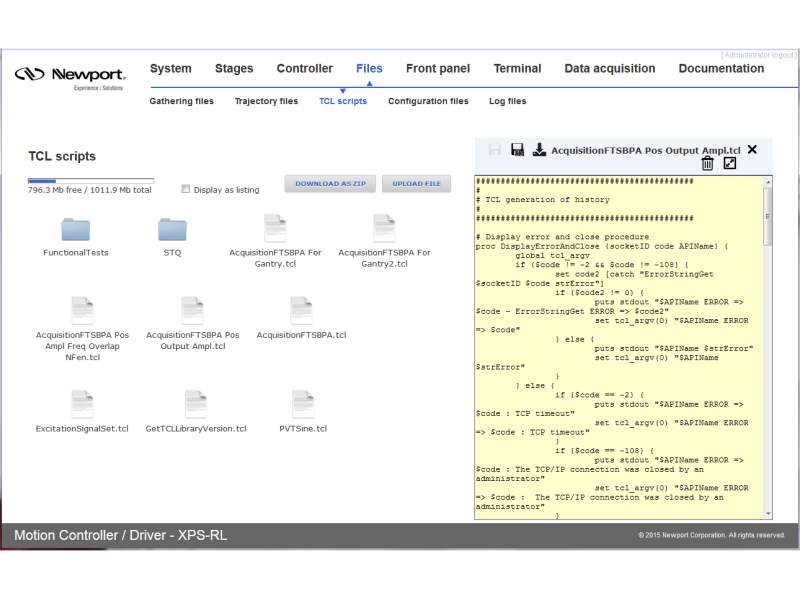
Intuitive File Management
The system files stored in the XPS-RLD are easily accessible, much like a Windows environment. At the same time, these files can be edited and saved in situ, without having to pull them from the folders and opening them with notepad or other text editor.
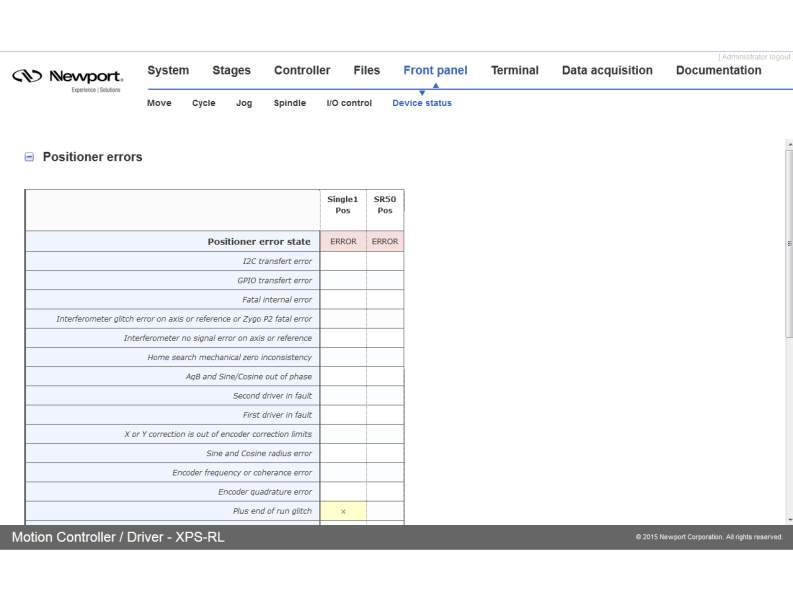
Meaningful Error Messages
Moving away from numerical error codes, a new set of more descriptive error codes is now available and visible in the XPS-RLD.
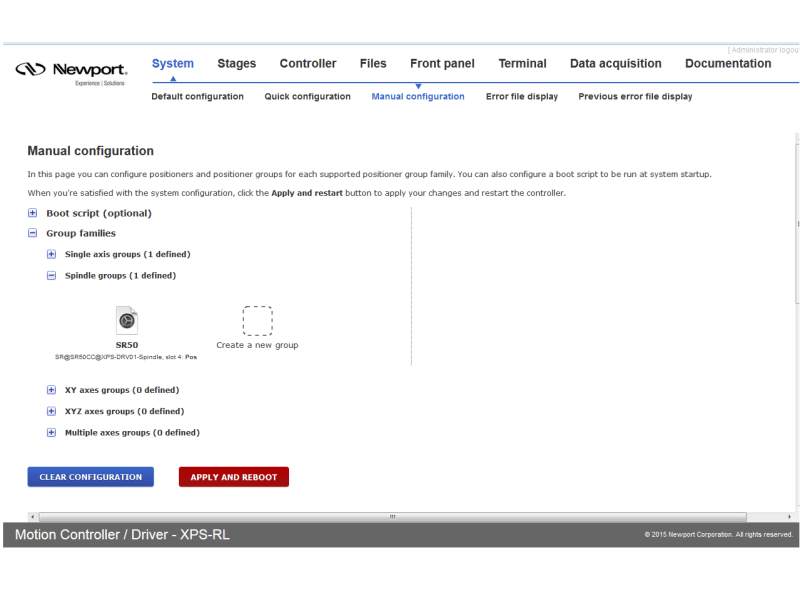
Optimum Position Grouping
Compensation for Maximum Accuracy
An extensive set of compensation features are available to the user including backlash, linear error and error mapping in single, 2D or 3D. All compensations are corrected dynamically at each servo cycle, updated at the rate of 10 kHz. This broad selection of options transforms the most basic positioner into a high performance device, thus increasing the accuracy and performance of any motion application, culminating in more reliable results.
Universal Driver Card Module
The

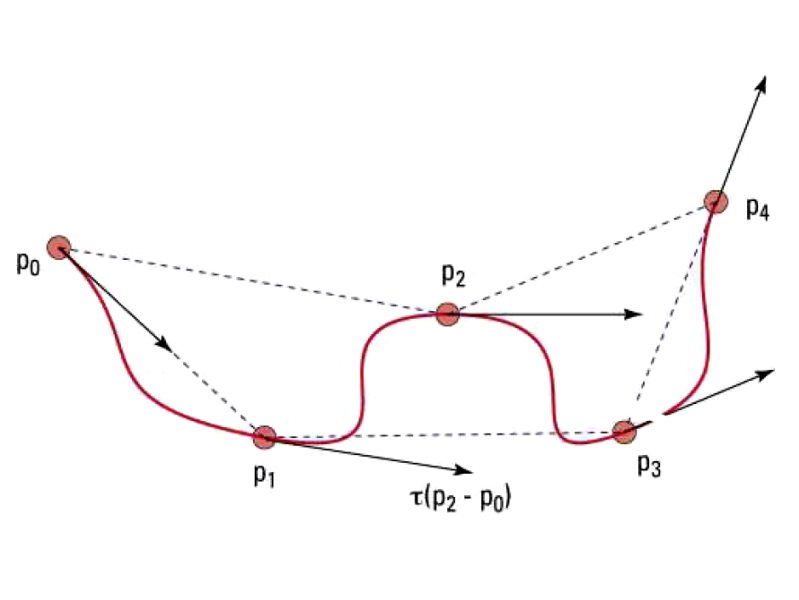
Line-Arc, Spline and PVT Trajectories Motion Paths
Inputs and Outputs for Integrating External Devices
The XPS-RLD provides GPIO with a total of 8 digital I/Os and 2 analog I/Os. These GPIOs can be used to read external switches, control valves or other digital devices. The analog outputs can be used to precisely monitor any motion axis (such as position, velocity or acceleration). To synchronize external devices during a motion process, the XPS has dedicated “event and action" API's which users can use to trigger an action upon the occurrence of an event. Typical examples include sending a digital output when constant velocity is reached or initiating a TCL script when the motion is done. Once defined, the XPS autonomously monitors the status of the event to trigger the action with a latency of 50 ns for position triggers and digital I/Os and 125 µs for analog I/Os. This powerful feature does not require any complex programming by the user and does not consume any time of the host PC or communication link since processing is done at the controller level. The XPS can be used as a master controller for a complete application.

Real-time Processing and Multitasking
Native Tool Command Language (TCL)
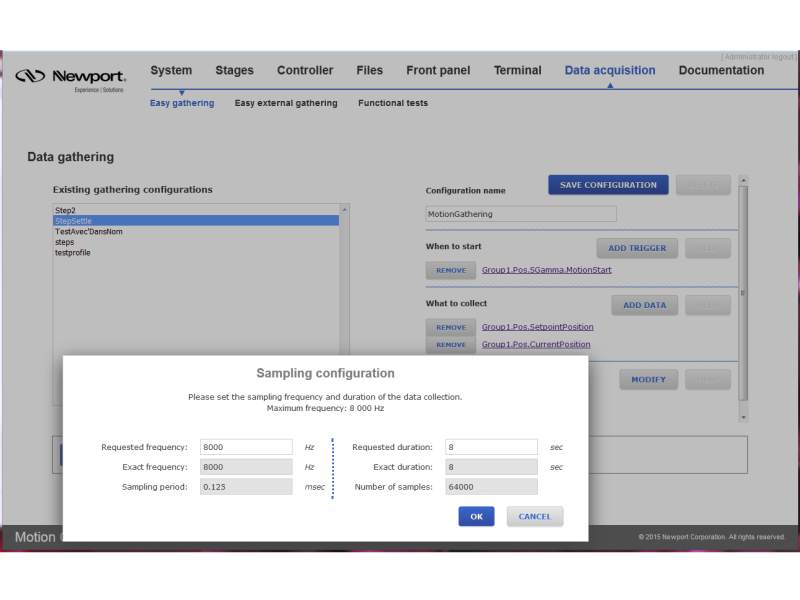
Easy Data Gathering
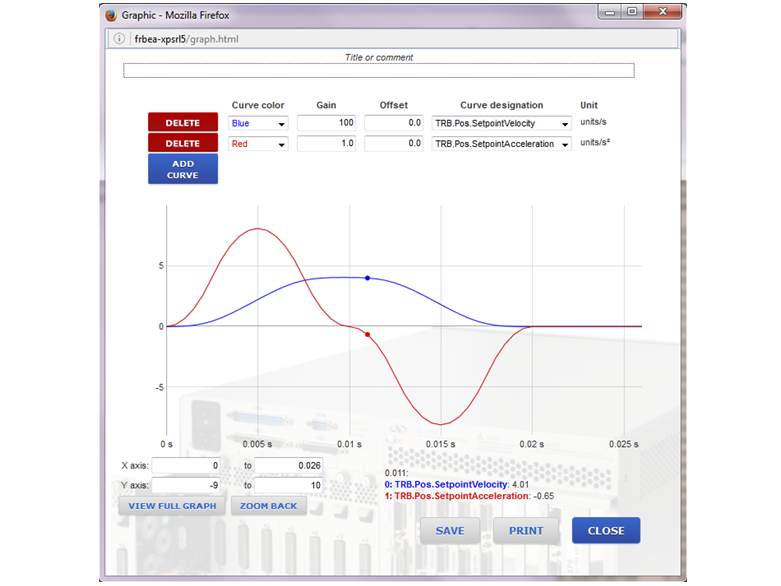
Gathered Data Plotting
Command Motion With an External Analog Device
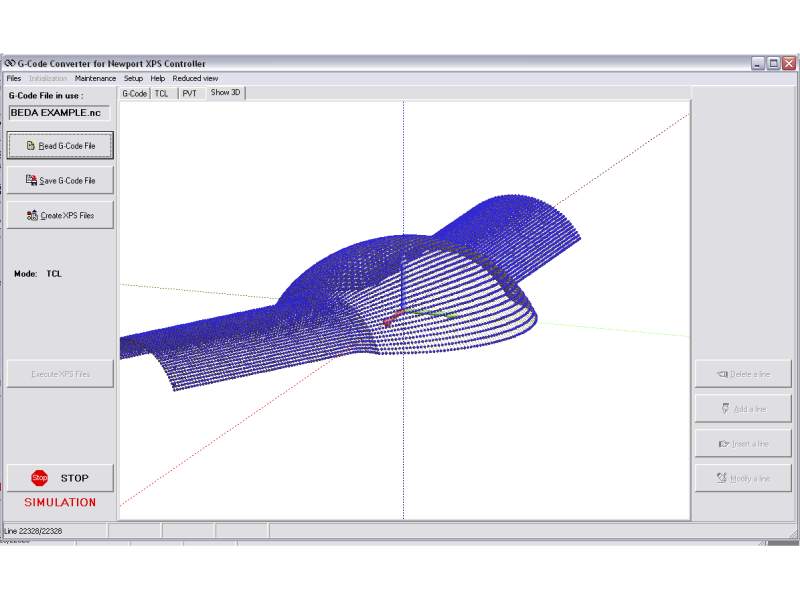
XPS-GCODE
XPS-GCODE software enables your XPS to become a powerful, high-precision laser machining center that can read and convert G-codes, display the tool path and execute trajectory routines with the power and precision of Newport Motion Control.
Stage and Actuator Compatibility
The XPS Universal High-Performance Motion Controller and Driver is compatible with the motorized stages and actuators from the product series listed below. For more details – including required driver cards and cables – please see the Stage and Controller Compatibility technical note or the motorized stage's or actuator's series page.
Motorized Linear Stages
-
High-Performance Mid-Travel ILS DC and Stepper Motor Linear Stages
-
High Load Capacity Steel MTN DC and Stepper Motor Linear Stages
-
High-Performance Long-Travel IMS DC and Stepper Motor Linear Stages
Motorized Rotation Stages
-
Integrated Vertical and Rotation ZVR DC and Stepper Motor Stages
-
High Precision BGM and BGS DC and Stepper Motor Goniometric Cradles
Motorized Vertical Linear Stages
Motorized Actuators
Accessories
Driver Cards
XPS-RLD controllers are capable of driving up to 4 axes of most Newport positioners.
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | XPS-DRV11Motion Controller Card, Universal, Stepper, DC, and Linear Motors | In Stock FREE 2-day shipping on thousands of products on Newport.com Learn More | ||||
 | XPS-DRV01PWM Drive Module, DC and Stepper Motors | In Stock | ||||
 | XPS-DRV00PPass-through Driver Module, Pulse and Direction | In Stock | ||||
 | XPS-DRV03PWM Drive Module, High Performance, DC Motors | In Stock | ||||
 | XPS-DRV02PWM Drive Module, Brushless Motors | |||||
 | XPS-DRVP1Nano Positioning Drive Module, Piezo-Stack | 6 Weeks FREE 2-day shipping on thousands of products on Newport.com Learn More | ||||
 | XPS-EDBLHigh-power, 3-Phase, Sinusoidal DC Brushless Motor Driver |

Softwares
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | XPS-GCODEG-code Software, XPS controller | 2 Weeks |
Notes:
Please contact tech support for more info.
Accessories



Similar Controllers
Other ESP Compatible Controllers
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
| XPS-RLD Universal High-Performance 1-4 Axis Motion Controller and Driver | |||||
 | ESP302 3-Axis DC and Stepper Motion Controller |
Resources
Technical Notes
Trigger Synchronization using a Newport XPS Series Motion Controller(303.1 kB, PDF) A Beginner’s Guide to Homing with the XPS(1.8 MB, PDF) Setting up an XPS with a Direct Drive Stage and SIN/COS Encoder(1.8 MB, PDF) Interfacing an Interferometer Encoder to an XPS Controller(148.9 kB, PDF) GUI_Launch_error_AdminRights_solution(33.9 kB, PDF) Control Theory Terminology Advanced Motion Electronics and Algorithms Newport Motion Control and EPICS Stage and Controller Compatibility Guide Optical Fiber Alignment - White Paper(8.6 MB, PDF) XPS-RLD Rack Mounting Instructions.pdf(732.5 kB, PDF) LabVIEW Programming Using XPS.NET Assembly(2 MB, PDF)
Application Notes
Photoresponse Mapping of Photovoltaic Cells(5.4 MB, PDF) Workstation for Laser Direct-Write Processing(4.4 MB, PDF) Optical Inspection With XY Stages in Lithography Machine System(221 kB, PDF) Fiber Grating Inscription System With Newport IMS Series Stage(211.5 kB, PDF) A Diamond in the Rough: Industrial Diamond Cutting and Processing with a 4-Axis Precision Motion System(517.1 kB, PDF) XY-Theta Motion System For Laser Scribing on LED Wafer(1.3 MB, PDF) AWARE - Wide Field of View Camera(517.7 kB, PDF) Extremely Large Telescope Metrology(408.5 kB, PDF) Building a High Performance Non-contact Optical Surface Metrology System(400.4 kB, PDF) Scanning X-ray Fluorescence with Newport Linear Stages(1.7 MB) Terahertz Pulse Generation with Ultrafast Laser and GTS Precision Linear Stage(641.2 kB, PDF) Fiber Spool Winding Application with Custom 5-Axis Motion System(145.1 kB, PDF) Z-Scan for the Characterization of Transparent Optical Materials(407.7 kB, PDF) Three-Dimensional Microfabrication by Two-Photon Polymerization(932.1 kB, PDF)
Software
XPS-UNIFIED Labview Drivers(27.7 MB, ZIP) HXP / XPS.Net Assembly _V2.3.1(8 MB, ZIP) XPS-D/XPS-RLD StageDataBase V4.3.18(376.2 kB, ZIP) Snapshot (firmware) Compatibility(382.9 kB, PDF) Snapshot-XPS-RLD-USB_N16107 w-PSO SN > 22348036(99.9 MB, ZIP) Snapshot-XPS-RLD-SATA_N16006 SN < 22348036(100.2 MB, ZIP) Firmware (Policy) Compatibility Table.pdf(114.4 kB, PDF)
Literature
Telecom Data Brochure(4.9 MB, PDF) Laser Machining Brochure 2018(3.4 MB, PDF)
Manuals
XPS-RLD Startup Manual(4.5 MB, PDF) XPS-D Configuration Manual.pdf(5.6 MB, PDF) XPS-D Features Manual.pdf(8.7 MB, PDF) XPS Unified - Programmer's Manual.pdf(6.8 MB, PDF) XPS-D - User Interface Manual(8.1 MB, PDF) PSO Multi-Axis User Guide.pdf(3.9 MB, PDF)
2D Product Drawings
XPS-RL(1.3 MB, PDF)
Data Sheets
XPS-RLD Datasheet.pdf(2.3 MB, PDF)




