
Integrated Vertical and Rotation Stepper Motor Stage for Wafer Positioning
Integrated Vertical and Rotation Stepper Motor Stage for Wafer Positioning
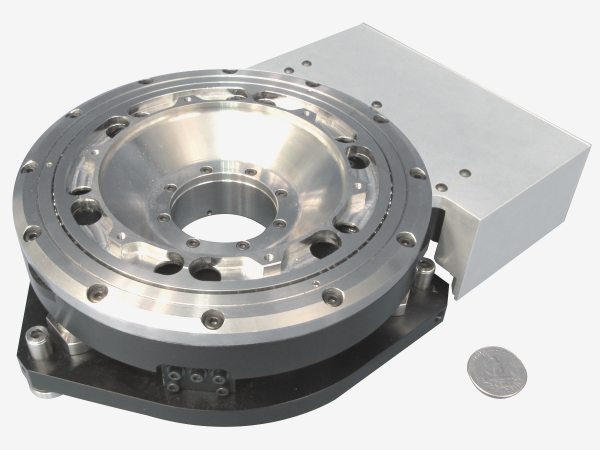
The ZVR stage integrates 10 mm of vertical (Z-axis) and 360° of continuous rotary (ϴ-axis) positioning with a unique three-point drive and bearing design. It is designed primarily to precisely elevate and rotate 200- and/or 300-mm wafer chucks and other samples or objects requiring adjustments to align the object's orientation or to focus. The stepper motors used in this stage are a lower cost alternative to DC servo systems for less demanding applications. Run open-loop, pulse count is a good indicator of position.
- Three-point bottom interface for stable mounting to any XY stage or other platform
- Large center aperture simplifies vacuum and electrical cable management
- Low mass and a high natural frequency enable rapid step-and-settle applications
- Stainless steel recirculating ball bearings
- Plug and Play – ESP compatible
- Lower cost alternative to DC servo systems See All Features
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | ZVR-PPWafer Positioning Stage, Integrated Vertical and Stepper Rotation Stage | 10 Weeks |
Notes:
DC Motor for ϴ-axis version is also available.
Compatible Controllers
Compatible motion controllers for this stepper motor driven stage are:
- XPS-RLD Motion Controller (
or Axis): Requires an Driver Module. - XPS-D Motion Controller (
, , or Axis): Requires an Driver Module. - ESP302 Motion Controller (
, , or Axis): Plug and Play compatible with ESP302 Motion Controller. Single Axis Motion Controller: 0.25 µm MIM for Z-axis and 1.0 mdeg for ϴ-axis when used with SMC100PP.
Features
Payload Design
Open Aperture
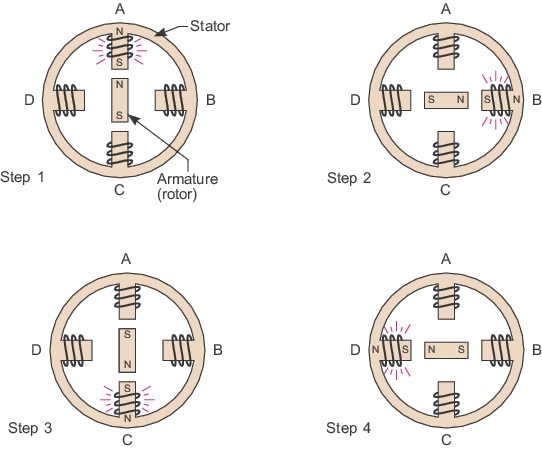
Economical Stepper Motor
The stepper motor version is a more economical version for less demanding applications. Instead of encoder feedback, a stepper motor reaches a position by the number of commanded steps. An advantage of stepper motors is that full torque is still provided even when idle. The ZVR stages are ESP-compatible, allowing the user to take advantage of Newport's smart-stage features when used with Newport controllers.
Adjustable Limit Switch and Origin Reference
The ZVR Series features an upper limit switch with a 4-mm adjustment range enabling the user to set the upper limit of travel. These stages are also equipped with a hardware origin that serves as an absolute reference (home) position.
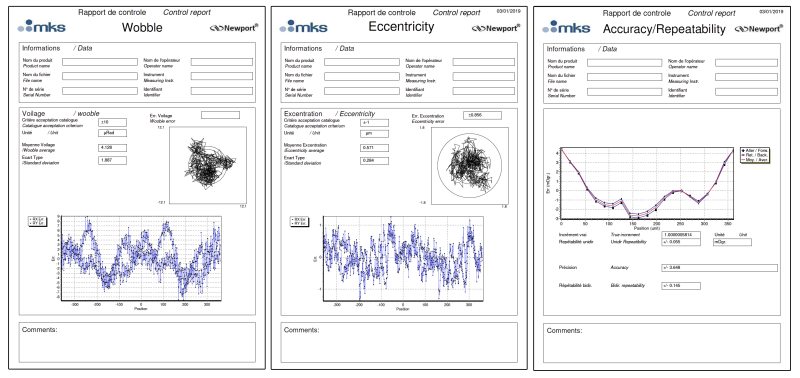
Metrology Report Included at No Additional Cost
Resources
Manuals
ZVR User's Manual.pdf(2.6 MB, PDF)





