
High Precision Hexapods
High Precision Hexapods
In comparison to stacked stages, Hexapods offer an easy, elegant solution to complex, multi-axis motion in a compact construction. Its dedicated firmware simplifies the programming of complex motion through the use of two coordinate systems and automatically computes coordinate transformations for straightforward programming of motion. To test out all our hexapods in simulation mode please click here for Hexaviz Simulation Software.
- Single device with 6 independent axes of motion
- Light and compact design, with high stiffness
- No moving cables
- RightPath trajectory control
- Two virtual centers of rotation set by software
- HexaViz Simulation Software See All Features
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | HXP100-MECAHexapod, High Precision, 200 mm Diameter Platform, 20 kg Load, M6 | In Stock | ||||
 | HXP100P-MECAHexapod, High Precision, 200 mm Diameter Platform, 6 kg Load, M6 | In Stock | ||||
 | HXP50-MECAHexapod, High Precision, 125 mm Diameter Platform, 5 kg Load, M6 | 12 Weeks |
Specifications
| Models | | | | |
|---|---|---|---|---|
| Size | Ø200 x 151 mm | Ø300 x 209 mm | Ø300 x 209 mm | |
| Platform Diameter | 125 mm | 200 mm | 200 mm | |
| Travel Range X, Y, Z1 | ±17, ±15, ±7 mm | ±27.5, ±25, ±14 mm | ±27.5, ±25, ±14 mm | |
| Travel Range ΘX, ΘY, ΘZ | ±9, ±8.5, ±18 ° | ±11.5, ±10.5, ±19 ° | ±11.5, ±10.5, ±19 ° | |
| Minimum Incremental Motion X, Y, Z | 0.10, 0.10, 0.05 µm | 0.5, 0.5, 0.25 µm | 0.10, 0.10, 0.05 µm | |
| Minimum Incremental Motion ΘX, ΘY, ΘZ | 0.05, 0.05, 0.10 mdeg | 0.25, 0.25, 0.5 mdeg | 0.05, 0.05, 0.10 mdeg | |
| Uni-directional Repeatability X, Y, Z - Typical | ±0.10, ±0.10, ±0.05 µm | ±0.25, ±0.25, ±0.125 µm | ±0.10, ±0.10, ±0.05 µm | |
| Uni-directional Repeatability ΘX, ΘY, ΘZ - Typical | ±0.05, ±0.05, ±0.10 mdeg | ±0.125, ±0.125, ±0.25 mdeg | ±0.05, ±0.05, ±0.10 mdeg | |
| Maximum Speed X, Y, Z | 14, 12, 5 mm/s | 2.5, 2, 1 mm/s | 12, 10, 5 mm/s | |
| Maximum Speed ΘX, ΘY, ΘZ | 6, 6, 15 °/s | 1.8, 1.7, 3 °/s | 8, 8, 16 °/s | |
| Rigidity X, Y, Z2 | 2, 2, 25 N/µm | 5, 5, 40 N/µm | 3, 3, 24 N/µm | |
| Centered Load Capacity3 | 50 N | 200 N | 60 N | |
| Connectors | DB25 Male (6) and DB15 Male (6) | DB25 M (6), non vacuum compatible | DB25 Male (6) and DB15 Male (6) | |
| Cable Length | 3 m | 3 m | 3 m | |
| Motor | DC Servo | DC Servo | DC Servo | |
| Weight | 2.2 kg | 7.2 kg | 7.2 kg | |
| Thread Type | M6 | M6 | M6 |
Notes:
- Travel ranges are interdependent. The listed values are max. travels per axis when all other axis are in their centered position.
- Stiffness depends on Hexapod position. Values are given for all axis in their centered position.
- Value shown for horizontal base plate. See graphs for maximum payload height and cantilever distance on product pages.
Features
HXP50-MECA 6 Axis Hexapod
HXP100-MECA 6 Axis Hexapod
Parallel Kinematic Motion
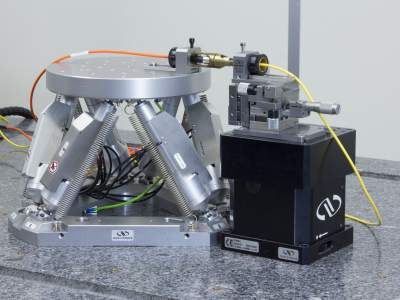
Hexapods are ingenious and effective solutions to complex motion applications that require high load capacity and accuracy in up to six independent axes. Parallel kinematic motion devices provide six degrees of freedom (X, Y, Z, pitch, roll, and yaw) in a compact solution to multi-axis positioning. As an alternative to stacking multiple stages, hexapods have no moving cables, are lower in overall cost, and offers error compensated motion.
High Precision Actuators
The quality of actuators has a critical impact on the overall motion performance of a hexapod. Drawing on over 55 years of Newport's expertise in actuators, the top plate of HXP hexapods is driven by 6 industry-proven, high performance actuators with encoder feedback at the leadscrew nut to provide precise minimum incremental motion, low backlash and fast speed.

Innovative Actuator Joints
Of equal importance to overall motion performance as the actuators are the 12 joints that connect these actuators to the base plate and moving top plate. Rather than using orindary universal joints, HXP hexapods utilize ceramic spherical joints to ensure constant preload over full travel, enhancing rigidity that reduces material stress, while improving performance and avoiding corrosion. The result is a hexapod that is more rigid with higher load capacity compared to other similarily sized hexapods.

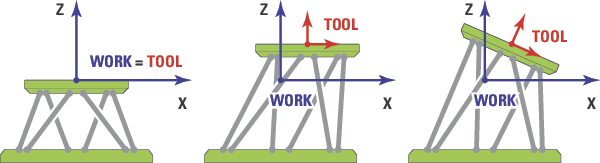
Two Virtual Centers of Rotation
Hexapod motion is defined by a global coordinate system and a local coordinate system, making programming motion more intuitive for standard research, metrology and manufacturing applications. Users can program up to two virtual pivot points without calculating coordinate system transformations or powering down the controller. The two virtual pivot points are origins of the two definable coordinates systems: Tool, which moves with the top plate, and Work, which is a stationary reference. This allows the user to conceptualize how the sample and tool are manipulated. For this 6-axis device, complex motion is simplified for easy user program development.
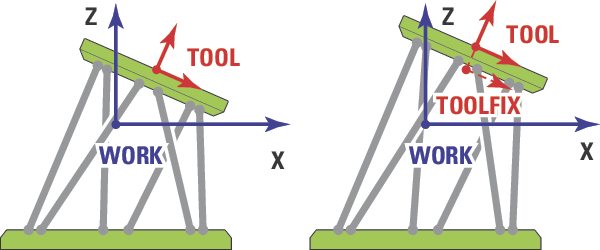
Translation Along Tool
Rotation Around Tool
Rotation Around Work
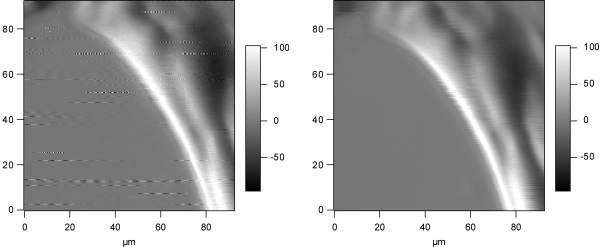
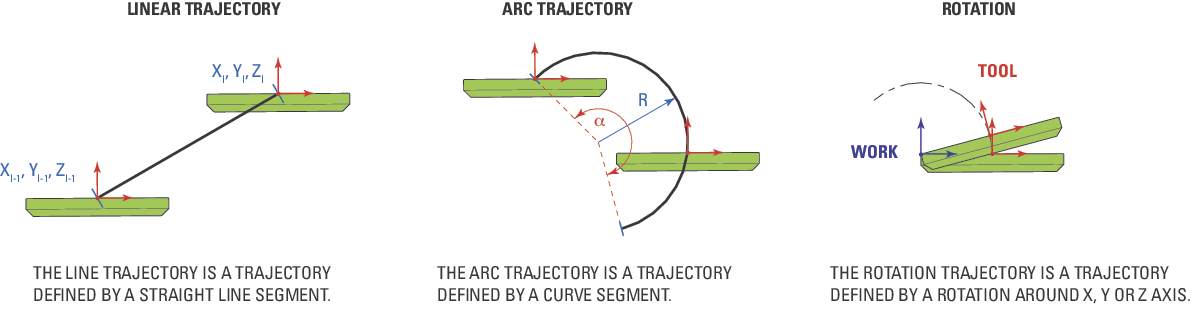
RightPath™ Trajectory Control
In parallel kinematic devices, motion is synchronized on the hexapod legs; all legs start and stop at the same time and always complete the same part of the trajectory. As a result, the motion does not necessarily translate into a straight trajectory in the World coordinate system. For small motion the effect is negligible, but for larger motion it could become noticeable. Newport engineers devised a solution to minimize the runout of hexapods through RightPath™ Trajectory Control. This firmware feature is unique to Newport hexapods and enables scanning motion along three types of trajectory functions – line, arc or rotation – in either Work or Tool.
These trajectory functions facilitate motion with:
• Minimal runout (deviation from the trajectory) during the move
• Continuous multi-dimensional motion path
• Constant velocity along the trajectory path
• Equal trajectory acceleration at start and end of move: acceleration = deceleration
• Calculations are performed before motion so there is no lag time
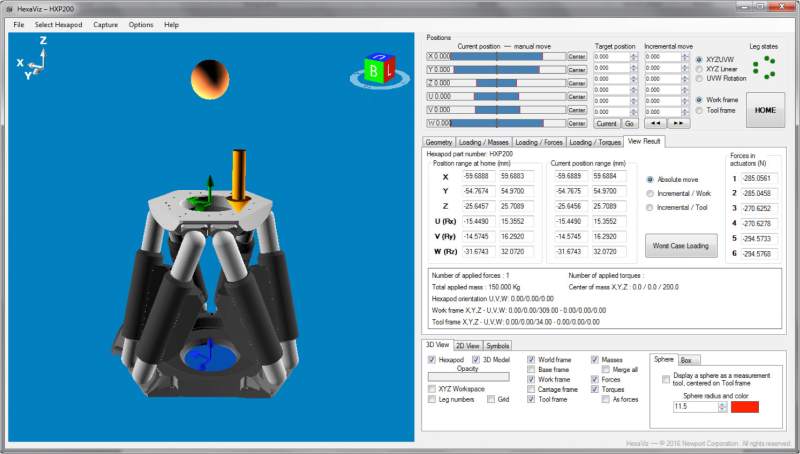
HexaViz™ Simulation Software
Our HexaViz hexapod simulator allows you to discover which Newport Hexapod model best fits your application needs before ordering. Newport's FREE HexaViz Hexapod Simulation Software provides an easy-to-use virtual hexapod interface to evaluate travel range, load capacity, force, and torque characteristics. For more information, please see our HexaViz brochure.
Hexapod Motion Controllers
Our HXP-ELEC high-performance multi-axis hexapod motion controllers are dedicated for the use with Newport Hexapods. The HXP-ELEC is based on the same hardware as the Newport XPS Universal High Performance Motion Controller/Driver, however it is preconfigured with special firmware to command the Hexapod mechanics. Firmware features are designed for simplified programming and integration. Choose the controller with the same prefix as the hexapod you would like to control. See accessory table below for compatible controllers.

High Accuracy, High Load and Vacuum Compatible Versions
The HXP series is also available in a High Accuracy Hexapod version that gurantees accuracy values – this enables the use of these hexapods in applications where position accuracy is required. When higher loads are needed, the High Load HXP series offers up to 450 kg of centered load capacity. And for vacuum aplications, the Vacuum Compatible HXP is rated for use at 10-6 hPa.

Hexapod Applications
Interferometry
Generally, interferometry is a family of techniques in which waves, usually electromagnetic, are superimposed in order to extract information. Interferometry can illustrate the flatness of optical surfaces to a very high resolution. Newport offers an extensive range of hexapod sizes that enable high precision interferometry. Our motion experts can also custom engineer a hexapod to meet your specifications, even for optics larger than 1.5 m in diameter.

Mirror or Optic Positioning
Optical assemblies often require strict alignment and holding position tolerance of sensitive optical elements to accurately direct beams. Hexapods offer the advantage of high precision and repeatable motion in six degrees of freedom. In conjunction with feedback systems, hexapod based optical systems will meet even the highest requirements.

Optical Fiber or Device Alignment
For alignment of optical fibers or optical devices (single or multi-mode, single to multi-channel, Si photonics) it is critical that motion is controlled not just in X, Y, and Z but also in tip and tilt. When coupled with alignment software such as APOGEE, the solution becomes a turnkey automated alignment system.
Imaging and Microscopy
Optical and electron imaging/microscopy involve the diffraction, reflection, or refraction of light/electron beams interacting with the specimen. The scattered radiation or electrons are measured and used in the construction of an image. When imaging small complex structures, Newport hexapods offer a competitive advantage with high precision, six degree of freedom and motion control in a compact solution.
Diffractometers
Our expertise in the design of advanced diffractometry solutions for synchrotrons is second to none. Sample position at beam ends can best be solved with hexapods. These solutions serve fundamental and applied research in areas such as life health sciences, physics and materials sciences.

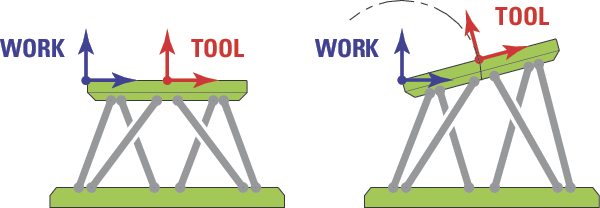
WORLD: Common Reference
WORK: Defined Relative to World
TOOL: Defined Relative to The Top Plate
Accessories
Hexapod Motion Controllers
The following hexapod motion controllers are compatible with these high precision hexapods. Choose the controller version with the same prefix as the hexapod you would like to control.
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | HXP50-ELEC-DMotion Controller, Hexapod, HXP50-MECA | 10 Weeks | ||||
| HXP100-ELEC-DMotion Controller, Hexapod, HXP100-MECA | |||||
| HXP100P-ELEC-DMotion Controller, Hexapod, HXP100P-MECA |
Resources
Application Notes
Hexapod with Image Derotator Brings Innovative Metrology Tools to Industrial Manufacturing(530.2 kB, PDF) Space Optics and Metrology with Hexapods(431 kB, PDF) Hexapod Solutions for Mass Transfer & Die Repair in Micro LED Manufacturing Equipment(2.1 MB, PDF) Precision Alignment in Photonic Device Assembly and Testing(2.6 MB, PDF)
Technical Notes
Motion in 3-D: Newport Hexapod Coordinate Systems(476.8 kB, PDF) Maintaining HXP Position after Controller Reboot(67.3 kB, PDF) GroupPositionCurrentGet command and HXP controller.pdf(915.7 kB, PDF)
Literature
HexaViz Hexapod Brochure(2.5 MB, PDF) HXP Series Hexapod Brochure(2.3 MB, PDF)
Manuals
XPS-D Configuration Manual.pdf(5.6 MB, PDF) HXP50-MECA User Manual(5.1 MB, PDF) HXP100-MECA User Manual(5.8 MB, PDF) HXP100P-MECA User Manual(10.5 MB, PDF) XPS Unified - Programmer's Manual.pdf(6.8 MB, PDF)




