
Hexapod Motion Controllers/Drivers
Hexapod Motion Controllers/Drivers

The HXP-ELEC-D is a high-performance motion controller, dedicated for use with Newport Hexapods, with the ability to control an additional two single-axis motion systems. The HXP-ELEC-D is based on the same hardware as the Newport XPS-D Universal High Performance Motion Controller/Driver, but it is preconfigured with special firmware to command the Hexapod mechanics. The firmware features are designed for simplified programming and integration.
- Controller and driver for Hexapod positioners
- HXP+2 feature enables use of two additional axes of motion
- RightPath™ Trajectory control for ultra low runout at constant velocity See All Features
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | HXP50-ELEC-DMotion Controller, Hexapod, HXP50-MECA | 4 Weeks | ||||
| HXP50HA-ELEC-DMotion Controller, Hexapod, HXP50HA-MECA | |||||
| HXP50V6-ELEC-DMotion Controller, Hexapod, HXP50V6-MECA | |||||
| HXP100-ELEC-DMotion Controller, Hexapod, HXP100-MECA | |||||
| HXP100HA-ELEC-DMotion Controller, Hexapod, HXP100HA-MECA | 9 Weeks | ||||
| HXP100P-ELEC-DMotion Controller, Hexapod, HXP100P-MECA | |||||
| HXP100PHA-ELEC-DMotion Controller, Hexapod, HXP100PHA-MECA | 9 Weeks | ||||
| HXP100V6-ELEC-DMotion Controller, Hexapod, HXP100V6-MECA | |||||
| HXP200-ELEC-DMotion Controller, Driver, Hexapod, For HXP200-MECA | |||||
| HXP200S-ELEC-DMotion Controller, Driver, Hexapod, For HXP200S-MECA | |||||
| HXP1000-ELEC-DMotion Controller, Hexapod, HXP1000-MECA |
Features
RightPath™ Trajectory Control
RightPath™ Trajectory Control is a firmware feature that enables scanning motion along a defined trajectory, line, arc or rotation, with minimal runout and at a constant, definable speed.
Inputs and Outputs for Integrating External Devices
The HXP-ELEC has a total of 60 digital I/O's to read external switches, control valves or other digital devices and 4 analog outputs to precisely monitor any motion axis (such as position, velocity or acceleration). To synchronize external devices during a motion process, the controller has dedicated “event and action" API's which users can use to trigger an action upon the occurrence of an event. Typical examples include sending a digital output when constant velocity is reached or initiating a TCL script when the motion is done. Once defined, the controller autonomously monitors the status of the event to trigger the action with a latency of less than 100 µs! This powerful feature does not require any complex programming by the user and does not consume any time of the host PC or communication link since processing is done at the controller level.

HXP+2
Upgrade the HXP-ELEC-D controller to run 2 extra axes in addition to 6 Hexapod axes. For example, extend the X-axis travel by mounting a hexapod on top of a linear stage, or extend the Z-rotational range by mounting a hexapod on top of a rotary stage. Or, simply customize the hexapod system with two independent axes.
Contact Inside Sales Support team to discuss application requirements and get a quote for your HXP+2 configuration.

Real-time Processing and Multitasking
Based on QNX real-time operating system and multi-tasking functionality, the HXP-ELEC is capable of executing complex, internally stored, user-generated applications using TCL scripts. The motion processor supports TCL program execution without adversely impacting higher-priority tasks. With this advanced real-time multi-tasking functionality, the controller not only manages the most complex motion requirements but also serves as a powerful, standalone process controller to concurrently support multiple applications.
Command Motion With an External Analog Device
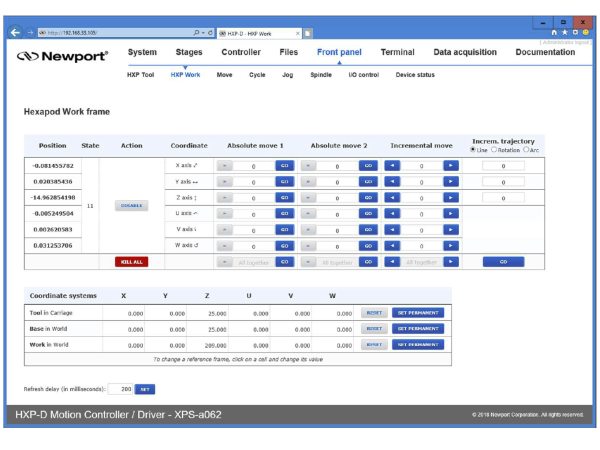
User-Friendly GUI
The HXP-ELEC provides users convenient, user-friendly access to the most common features and functions of the controller. All software tools are implemented as a web interface which is independent from the user's operating system and does not require any specific software on the host PC.
Joystick Controller
The HXP-D-Joystick enables the use of the included commercial Joystick Logitech F710 on a hexapod system controlled by Newport HXP-ELEC-D Motion Controller. HXP-D-Joystick reads Joystick commands and converts them into HXP-ELEC-D controller commands including repeated incremental moves to simulate analog control and axis selection.
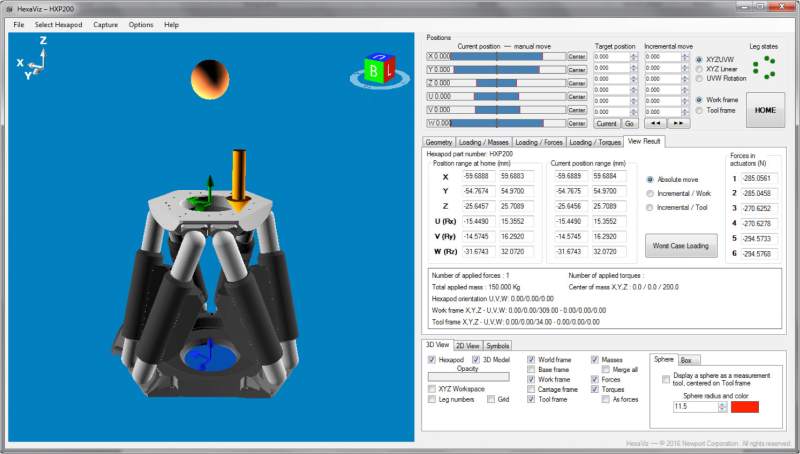
HexaViz™ Simulation Software
Our HexaViz hexapod simulator allows you to discover which Newport Hexapod model best fits your application needs before ordering. Newport's FREE HexaViz Hexapod Simulation Software provides an easy-to-use virtual hexapod interface to evaluate travel range, load capacity, force, and torque characteristics. For more information, please see our HexaViz brochure.
Accessories
| Compare | Description | Drawings, CAD & Specs | Avail. | Price | ||
|---|---|---|---|---|---|---|
 | HXP-D-JOYSTICKJoystick Controller, HXP Series Hexapods |
Resources
Application Notes
Hexapod with Image Derotator Brings Innovative Metrology Tools to Industrial Manufacturing(530.2 kB, PDF) Space Optics and Metrology with Hexapods(431 kB, PDF) Hexapod Solutions for Mass Transfer & Die Repair in Micro LED Manufacturing Equipment(2.1 MB, PDF) Precision Alignment in Photonic Device Assembly and Testing(2.6 MB, PDF)
Software
HXP / XPS.Net Assembly _V2.3.1(8 MB, ZIP) HXP Script Examples(3.3 kB, ZIP) HXP Installer Pack 30003.zip(42.7 MB, ZIP) Maintaining HXP Position after Controller Reboot(44.4 kB, ZIP) Snapshot (firmware) Compatibility(382.9 kB, PDF) Snapshot-HXP-D-USB_N50108 w-PSO (99.9 MB, ZIP) Snapshot-HXP-D_SATA_N50004(100.1 MB, ZIP)
Technical Notes
Motion in 3-D: Newport Hexapod Coordinate Systems(476.8 kB, PDF) Maintaining HXP Position after Controller Reboot(67.3 kB, PDF)
Literature
HXP Series Hexapod Brochure(2.3 MB, PDF)
Manuals
XPS-D and HXP-ELEC-D Start-Up Manual.pdf(8.2 MB, PDF) XPS-D - User Interface Manual(8.1 MB, PDF) PSO Multi-Axis User Guide.pdf(3.9 MB, PDF)




