Fundamentals of Motion Control
Positioning Basics
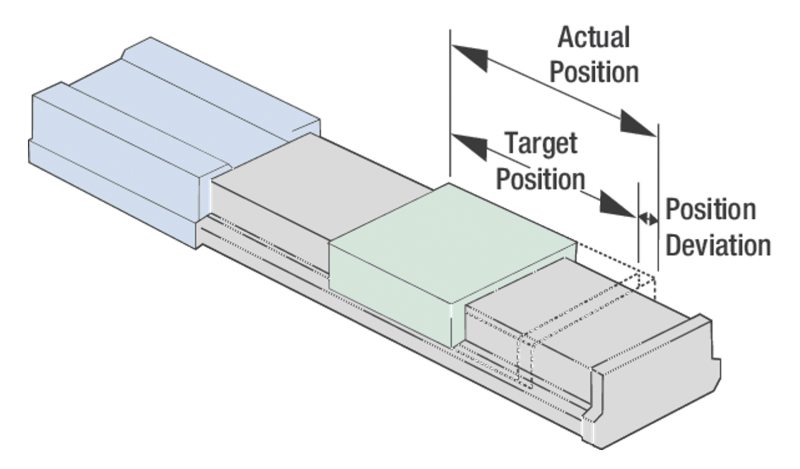
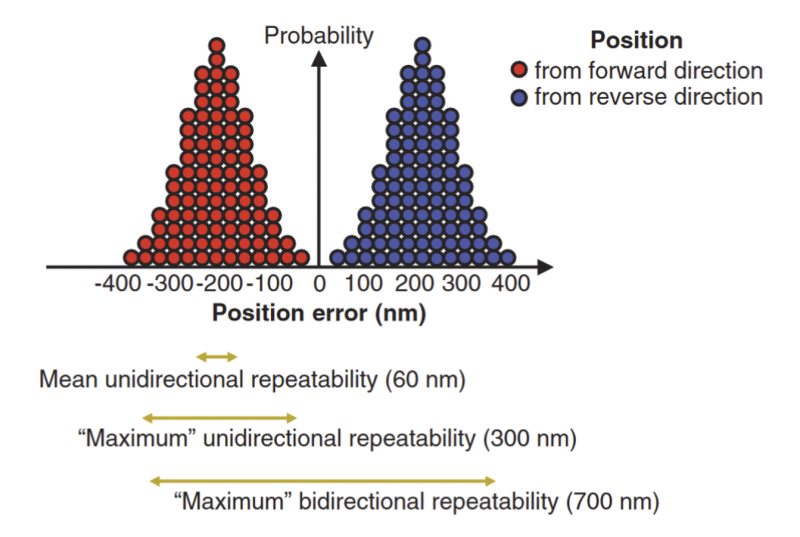
In addition to traveling an ideal trajectory, a stage should reliably reach and maintain a specified target position. Reversal error is the distance between the actual positions reached for a given target position, when approached from opposite directions (see Figure 2). This value is a combination of backlash and hysteresis. Backlash is the result of relative movement between interacting mechanical parts of a drive system that does not produce output motion. Contributing factors include clearance between mechanical parts such as gear teeth and mechanical deformation. Not all systems have backlash but, when they do, it mainly affects bi-directional repeatability (see below). Backlash can be compensated by motion controllers due to its repeatable nature. Hysteresis is a component of reversal error that is dependent on the recent history of the system. It is the result of elastic forces in the various components and is observed when the forces acting on a system reverse direction. Hysteresis affects both bi-directional repeatability and accuracy (see below). Unlike backlash, hysteresis is present in all mechanical systems although its value may be low. While reversal error relates to a stage's ability to reach the target position, position stability is the ability to maintain a position within a specified position range over a specified time interval. It is the sum of drift and vibrations. Drift is the slow deviation from a stable position. It mainly depends on the migration of lubricants and thermal variations. Vibrations are fast alternative motions of small amplitude generated by the environment, e.g. noise from the flow, air fans, and electronics, e.g. a motor driver.
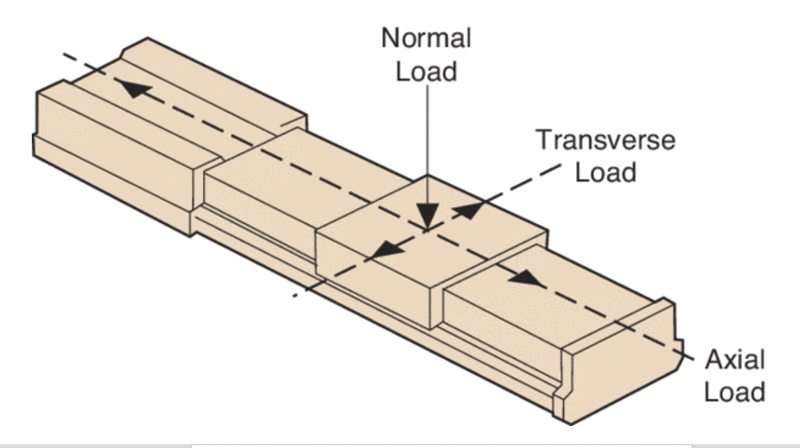
Load capacity is the maximum allowable force that can be applied to a stage in a specified direction while meeting stage specifications. This maximum force includes static (mass times gravity) and dynamic forces (mass times acceleration). Dynamic forces must include any external forces such as vibrations acting upon the stage. The amount of acceleration a stage can impart to a mass is limited to the accelerating force it can produce without exceeding the load capacity. In particular, the centered normal load capacity is the maximum load (centered on the carriage and in a direction perpendicular to the axis of motion) that can be applied to a linear stage (see Figure 3). For rotary stages, it is the maximum load along the axis of rotation. Transverse load capacity, also called side load capacity, is the maximum load that can be applied perpendicular to the axis of motion and along the carriage surface. This is typically smaller than the normal load capacity. Axial load capacity is the maximum load along the direction of the drive train. For linear stages mounted vertically, the specified vertical load capacity is usually limited by the axial load capacity. The maximum load capacity of a stage is diminished when the load is not centered. Inertia is the measure of load's resistance to change in speed. The larger the inertia, the greater the force required to accelerate or decelerate the load. If there is a constraint on the amount of force available, then the allowable acceleration and deceleration must be adjusted to an acceptable value. Inertia is a product of mass elements and the square of their distance from the axis of rotation. The maximum inertia specified for rotary stage is a value based on available torque.
Motion Control Specifications
For additional insights into photonics topics like this, download our free MKS Instruments Handbook: Principles & Applications in Photonics Technologies
Request a Handbook